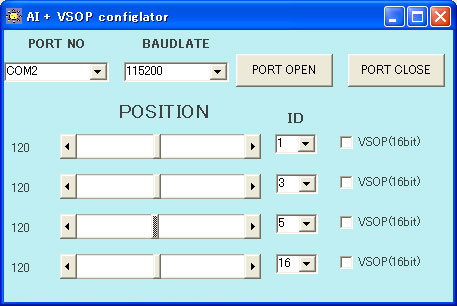
★今回のVSOPのテーマは「お気楽、お手軽」、
で当然お気楽に使用するためには、間違っても燃えるなんてことはあってはならない
ので、プロテクト機能が一体になったHブリッジ内臓のモータドライバをチョイス、
かといって東芝系のモータドライバのようにあまり余裕度がないとあっという間に
プロテクトにひっかかり止まってしまう。
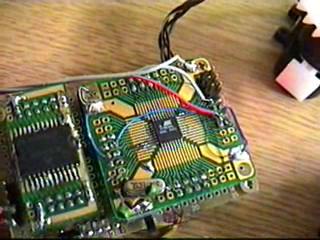
そこで今回テストしたのは2つ、モトローラのMC33887、テキサスインスツルメントのTPIC0108
33887の方はリアルタイムに電流モニタが出来、温度、電流のプロテクトならびに
ステータスが1本ありその上DCで5Aまで流せるすぐれもの・・・
まさにお気軽に使えるICなのだが、いかんせん大きすぎで却下・・・
次にテストした0108も電流モニタこそ出来ないがそれなりにお手軽、
これならサーボケース内の基板に収まると思ったが、レイアウトしてみると
とても収まる大きさではない。
★で、結局ディスクリートで組むはめに・・・・
ロボスペで痛切に感じたことが一つ、DRIVE-CARDはFREE(脱力)モードが出来ない、
常にブレーキがかかっている状態なので、ちょっとしたことですぐに脱臼、復旧。。。。の繰り返し
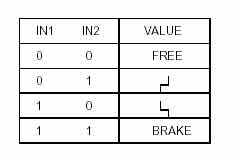
今回のドライブ回路はブレーキ、CW、CCW、FREEの4つのモードが出来るようにする
表にするとこんな感じ
しかしながらFETのことなどすっかり忘れてしまったので、とりあえず宮田さんの所でお勉強。
なんとか小信号用のFETを4つ使用し出来上がる
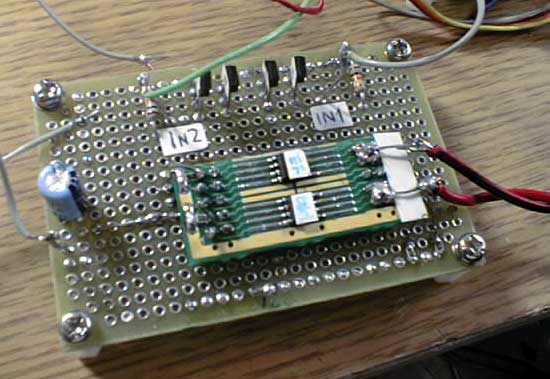
でテスト、ブレーキ、CW、CCW、FREEがOKでVSOPに接続、うそみたいに問題がない!
こうなるとブレーキとFREEの間をPWMを使ってDUTYを制御すればブレーキパワーも最小から最大までいける?・・・かな^_^;
↑で結局お手軽からカリカリチューンモードに入ってしまった・・・・