廐寧3664婎斅偱DS2柍慄僐儞僩儘乕儔傪惢嶌偡傞
惢嶌丄僐儅儞僪愢柧 丂丂婎杮愢柧曇偵栠傞
巊梡偡傞晹嵽
儘僕僋乕儖惢僐乕僪儗僗僐儞僩儘乕儔
丂丂丂昡壙婰帠
1丂2丂3
儘僕僋乕儖僆儞儔僀儞僗僩傾丂掕壙丂4580墌
廐寧3664婎斅丂掕壙丂1680墌
3.3V儗僊儏儗乕僞丂100墌偖傜偄
偦偺懠攝慄嵽椏側偳
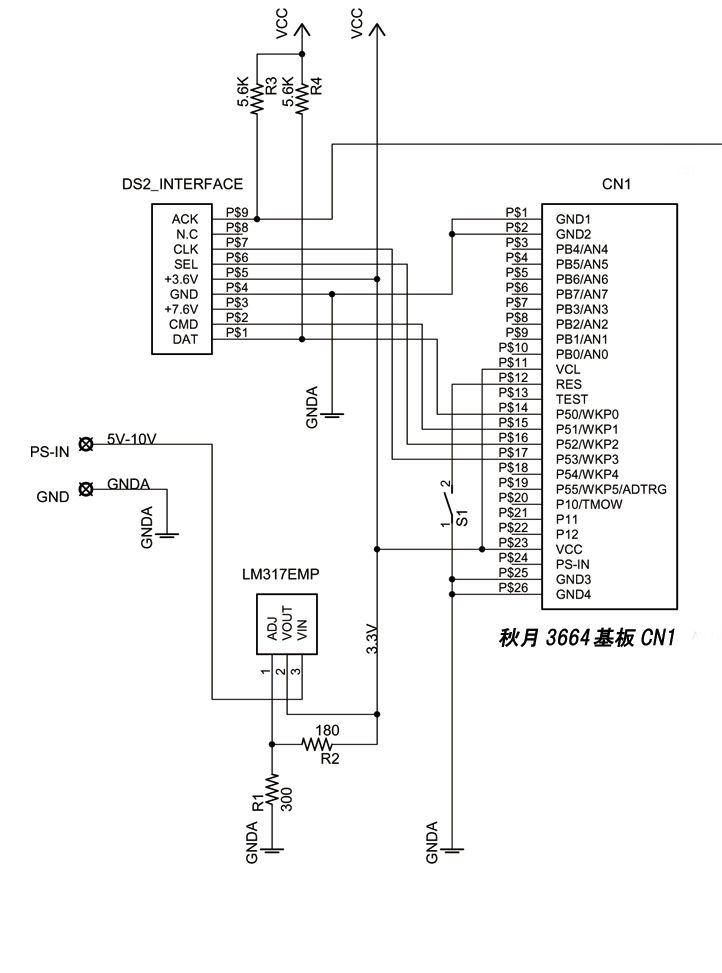
愙懕
傑偢偼廐寧3664婎斅偲柍慄僐儞僩儘乕儔庴怣晹傪偙偺傛偆偵攝慄偟偰偔偩偝偄丅
ACK偼崱偺偲偙傠撉傫偱偄傑偣傫偺偱僾儖傾僢僾偺傒偱OK丅
3.3V惗惉偺儗僊儏儗乕僞LM317EMP偼庤帩偪偺娭學偱偙偆側偭偨偩偗偱
懠偺屌掕宆儗僊儏儗乕僞偱廩暘偱偡乮僐儞僨儞僒娭學偼揔摉偵擖傟偰抲偄偰壓偝偄乯
彯7.6V偵偼壗傕宷偘偰偄傑偣傫偑丄弮惓僐儞僩儘乕儔側偳偱僶僀僽儗乕僔儑儞摦嶌偝偣傞
応崌偼7.6V傪惗惉偟偰宷偘偰偍偄偰壓偝偄丅
揹尮偵偮偄偰
僨儏傾儖僔儑僢僋偺揹尮偼3.6V丄7.6V偺2宯摑偁傝傑偡丄偙偺偆偪7.6V偼怳摦儌乕僞梡偺揹尮側偺偱柍帇偱偒傑偡偑
栤戣側偺偼3.6V偺傎偆偱偡丅乮撪晹偺儘僕僢僋偼3.3V偱働乕僽儖側偳偺懝幐傪峫偊3.6V偲側偭偰偄傞乯
摉弶弮惓偺僐儞僩儘乕儔偱幚尡傪偟偰偄傑偟偨偑丄偦偺帪偼5V偱偙傟偲偄偭偨栤戣傕側偔摦嶌偝偣偰偄傑偟偨
偟偐偟柍慄僐儞僩儘乕儔偺応崌偼偩傔偱偡丄傗偼傝PS2偲摨偠傛偆偵3.6V偑昁梫偲側傝傑偡丅
乽偁乕偁3664偲宷偘傞偵偼娫偵儗儀儖曄姺梡IC傪巊傢側偗傟偽偩傔偐乿偲巚偄傑偟偨偑
3664偺僴乕僪儅僯儏傾儖傪撉傫偱偄偰尒偮偗傑偟偨
乽18丄揹尮夞楬乿
乽18.1丂撪晹揹尮崀埑夞楬傪巊梡偡傞応崌乿
偊両側偵偙傟両
撉傫偱傒傞偲丄懠偺TINY傕娷傔撪晹偺CPU杮懱偼3.0乣3.6V偱摦嶌偟偰偄傞傛偆偱偡
側傜 揹尮崀埑夞楬傪僷僗偡傟偽揹尮偼3.0乣3.6V偱摦嶌偝偣傞偙偲偑偱偒傑偡丅
嬶懱揑偵廐寧3664偱偳偆偡傟偽偄偄偺偐偲尵偆偲
1丄婎斅僕儍儞僷JP1偺僷僞乕儞晹傪僇僢僩
2丄婎斅棤柺偵偁傞僐儞僨儞僒丄C7丂0.1uF庢傝奜偡
3丄CN1-11乮VCL乯傪CN1-23乮VCC乯偵愙懕偡傞
4丄奜晹儗僊儏儗乕僞偱3.3V傪惗惉
5丄惗惉偟偨3.3V傪CN1-23(VCC乯偵愙懕
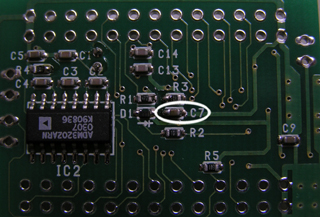 廐寧婎斅棤懁丄敀偄娵報晹暘偺C俈傪庢傝奜偡丅
廐寧婎斅棤懁丄敀偄娵報晹暘偺C俈傪庢傝奜偡丅
偙傟偱廐寧3664偑3.3V巇條偲側傝傑偡
側傞傎偳丄偩偐傜232C僪儔僀僶偑3.3V懳墳偺ADM3202偵側偭偰偄傞偺偱偡偹丅
僜僼僩僂僃傾彂偒崬傒(慡偰僶僀僫儕僼傽僀儖偱偡丄僜乕僗偑梸偟偄曽偼儊乕儖偱乯
(塃僋儕僢僋仺懳徾傪僼傽僀儖偵曐懚丄偱僟僂儞儘乕僪偟偰壓偝偄乯
儀僗僩僥僋僲儘僕乕惢偺GCC丂Debelopper light晅懏偺僼儔僢僔儏儔僀僞傪巊梡偡傞応崌
PSIF.mot (儌僩儘乕儔S僼僅乕儅僢僩乯
僀僄儘乕僜僼僩惢丂Yeloow丂IDE丂晅懏偺僼儔僢僔儏儔僀僞傪巊梡偡傞応崌
PSIF.S丂(儌僩儘乕儔S僼僅乕儅僢僩乯
懠偺僼儔僢僔儏儔僀僞傪巊梡偡傞応崌
PSIF.HEX丂乮僀儞僥儖HEX僼僅乕儅僢僩乯
忋婰偺偄偢傟偐傪僟僂儞儘乕僪偟彂偒崬傫偱偔偩偝偄丅
2005/02/04 僄僐乕僶僢僋OFF丂57600倐倫倱仺38400bps偵曄峏斉
PSIF.mot (儌僩儘乕儔S僼僅乕儅僢僩乯
PSIF.S丂(儌僩儘乕儔S僼僅乕儅僢僩乯
PSIF.HEX丂乮僀儞僥儖HEX僼僅乕儅僢僩乯
僴僀僷乕僞乕儈僫儖偺愝掕
崱夞偺偙偺婎斅偲偺愙懕偼旕摨婜僔儕傾儖乮57600bps)(38400bps)偱偡
(2005/02/04 儃乕儗乕僩曄峏乯
PC偺僴僀僷乕僞乕儈僫儖側偳偺捠怣僜僼僩偱摦嶌妋擣偑峴偊娙堈揑側
儌僯僞傪幚憰抳偟傑偟偨偺偱丄傑偢偼僴僀僷乕僞乕儈僫儖傪棫偪忋偘傑偡
僾儘僌儔儉仺傾僋僙僒儕仺捠怣仺僴僀僷乕僞乕儈僫儖
僼傽僀儖仺僾儘僷僥傿偱
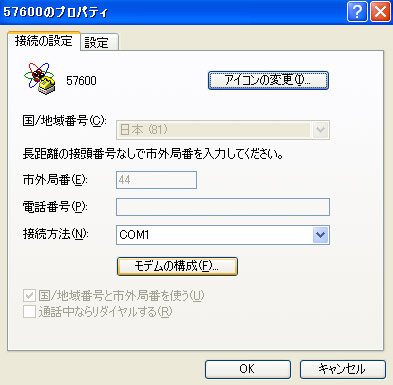
儌僨儉偺峔惉傪僋儕僢僋偟傑偡
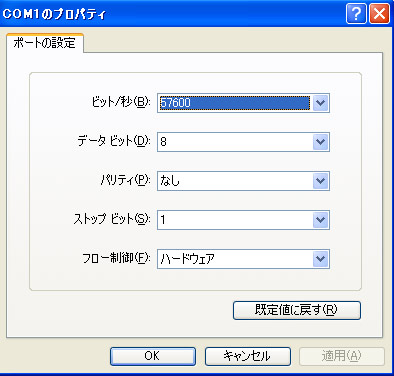
價僢僩/昩傪57600 38400偵曄峏偟傑偡丅
(2005/02/04 儃乕儗乕僩曄峏乯
揹榖偺儅乕僋傪墴偟偰愙懕偟傑偡乮奊偺忬懺偼愗傟偰偄傞忬懺乯

奊偺忬懺偼愙懕偝傟偰偄傑偡
僐儅儞僪夝愢
僴僀僷乕僞乕儈僫儖偲愙懕偝傟偰偄傞忬懺偱婎斅偺儕僙僢僩僗僀僢僠傪墴偡偲
偲昞帵偝傟偰偄傟偽愙懕偑姰椆偟偰偄傞忬懺偱偡丄
偙傟埲崀偼埲壓偺僐儅儞僪偑幚峴壜擻偱偡丅
僨僶僢僌梡乮PC愙懕梡僐儅儞僪乯
ds1 xxxxx y丂(僨儏傾儖僔儑僢僋巇條乯
偙傟偼埲慜偺儌僨儖偺巇條偱偁傝丄ds1 500 1偲僞僀僾偟僄儞僞乕偡傞偲(ds1偲500丄500偲1偺娫偼僗儁乕僗乯 丂丂
僐儞僩儘乕儔偺MODE儔儞僾偑徚摂偟偰偄傞忬懺偱偼儃僞儞偺僨僕僞儖僨乕僞偑, 丂丂
MODE儃僞儞傪墴偟偰愒偔揰摂偟偰偄傞忬懺偱偼僨僕僞儖僨乕僞+僗僥傿僢僋4幉 丂丂
偺傾僫儘僌検偑500夞庢傝崬傔傑偡丅 丂丂 丂
500偺偁偲偵懕偔1偼儌乕僞偺怳摦ON丄OFF偱偁傝0偱OFF丄1偱ON偑巜掕壜擻偱偡偑
偙偺儌乕僪偺応崌偼傾僫儘僌揑偵偼怳摦惂屼偱偒傑偣傫丅
彯 僨僕僞儖儌乕僪偺帪偼儌乕僞偼摦偒傑偣傫丅 儌乕僞偺怳摦僐儅儞僪偼徣棯壜擻偱偡丅 椺丂ds1 500丂僄儞僞乕
椺偊偽忋婰偺僐儅儞僪傪幚峴偡傞偲丒丒丒
僨僕僞儖儌乕僪乮儌乕僪儔儞僾徚摂乯偺応崌
DualShock1丂read 偲昞帵偝傟夵峴屻
6F EF FF FF FF FF 偲昞帵偝傟偰偄傑偡
僨僕僞儖儌乕僪偺応崌嵟弶偺2偮偩偗乮6F EF)偑桳岠側僨乕僞偱偁傝
奺儃僞儞偺ON丄OFF乮墴偟偰0乯偑16價僢僩偱昞尰偝傟偰偄傑偡丅
儃僞儞偲價僢僩偲偺妱傝摉偰偼娭楢儕儞僋偺奺暥彂傪偍撉傒偔偩偝偄丅
儌乕僪儃僞儞傪墴偟儌乕僪儔儞僾偑揰摂偟偰偄傞忬懺偱偼
屻傠偺4僶僀僩偑桳岠偲側傝丄慜2僶僀僩偱奺儃僞儞偺ON,OFF忬懺
巆傝4僶僀僩偱 2杮偺僕儑僀僗僥傿僢僋偺傾僫儘僌検偑昞帵偝傟傑偡丅
偙偺応崌偼傾僫儘僌儌乕僪偵側偭偰偄傑偡偺偱怳摦傕ON偝傟傑偡丅
摦夋丂
ds2 xxxxx yyy z丂(僨儏傾儖僔儑僢僋2巇條乯
ds2 500 255 1丂偲僞僀僾偟僄儞僞乕偡傞偲 16幉暘偺傾僫儘僌検+僨僕僞儖僨乕僞傪500夞庢傝崬傒傑偡丅
500偺偁偲偵懕偔255偼戝儌乕僞偺怳摦儗儀儖偱偁傝0乣255傑偱偑巜掕壜擻偱偡
偝傜偵255偺偁偲偵懕偔1偼彫儌乕僞偺ON丄OFF偱偁傝1偱ON,0偱OFF偵側傝傑偡
彯儌乕僞偺怳摦僐儅儞僪偼徣棯壜擻偱偡丅 椺丂ds2 500丂僄儞僞乕
椺偊偽忋婰偺僐儅儞僪傪幚峴偡傞偲丒丒丒

DualShock2_read 偲昞帵偝傟丄慜偐傜2僶僀僩乮FF E1)偑奺儃僞儞偺ON,OFF,師偺4僶僀僩偱僕儑僀僗僥傿僢僋2杮偺
傾僫儘僌僨乕僞丄巆傝偺12僶僀僩偑奺儃僞儞偺墴壓偘検偺傾僫儘僌僨乕僞偲側傝傑偡丅
傕偪傠傫戝儌乕僞偼怳摦偑8價僢僩偱惂屼偱偒彫儌乕僞偼ON丄OFF偺傒偺惂屼偑壜擻偱偡丅
hart (僶僀僽儗乕僔儑儞僒儞僾儖乯
崱夞偺幚尡偱寢峔柺敀偐偭偨偺偑僶僀僽儗乕僔儑儞婡擻偱偡丄偆傑偔巊偊偽怓乆巊偊偦偆偱偡丅
椺偊偽2懌曕峴儘儃僢僩偺懌棤僙儞僒偲慻崌偣偰曕峴偵崌傢偣怳摦偝偣傞側偳偳偆偱偟傚偆丠
儅僀僐儞愙懕梡
埲壓偺僐儅儞僪偼忋埵愙懕偑儅僀僐儞傪憐掕偟
僀儞僞乕僶儖僞僀儅側偳偱廃婜揑偵僐儅儞僪傪敪峴偟偰僨乕僞傪庢傝崬傒傑偡丅
d1丂丂
僨僕僞儖儌乕僪偱奺儃僞儞偺ON,OFF忬懺傪1夞庢傝崬傒丄曉偡暥帤楍偵偼#D1偑愭摢偵晅偒傑偡
儅僀僐儞偐傜偙偺暥帤楍傪憲傞応崌偼昁偢偙偺偁偲偵夵峴僐乕僪( '\n'偐0x0d) 傪擖傟偰壓偝偄
椺丂puts("d1\n");
![]()
偙偺椺偱偼丂7F 67偑桳岠側撉傒庢傝僨乕僞偱偡丅
a1 xxx y丂
傾僫儘僌儌乕僪偱1夞庢傝崬傒丄 曉偡暥帤楍偵偼#A1偑愭摢偵晅偒傑偡丅
儅僀僐儞偐傜偙偺暥帤楍傪憲傞応崌偼昁偢偙偺偁偲偵夵峴僐乕僪( '\n'偐0x0d)傪擖傟偰壓偝偄
椺丂puts("a1 255 1\n");
xxx 偼戝儌乕僞惂屼乮0乣255乯丂y 偼彫儌乕僞ON乮1乯OFF乮0). 戝丄彫嫟偵徣棯壜擻丂椺丂puts("a1\n");
儃僞儞墴壓偘偺傾僫儘僌偼庢傝崬傑側偄丅
![]()
偙偺椺偱偼丄FD F5偑奺儃僞儞偺ON丄OFF丅72丂6C丂E3丂4F偑僕儑僀僗僥傿僢僋2杮偺傾僫儘僌検丅
ds xxx y
僨儏傾儖僔儑僢僋俀僱僀僥傿僽儌乕僪偱1夞庢傝崬傒丄 曉偡暥帤楍偵偼#DS偑愭摢偵晅偒傑偡丅
儅僀僐儞偐傜偙偺暥帤楍傪憲傞応崌偼昁偢偙偺偁偲偵夵峴僐乕僪( '\n'偐0x0d) 傪擖傟偰壓偝偄
椺丂puts("ds 255 1\n");
xxx 偼戝儌乕僞惂屼乮0乣255乯丂y 偼彫儌乕僞ON乮1乯OFF乮0). 戝丄彫嫟偵徣棯壜擻丂椺丂puts("ds\n)
儃僞儞墴壓偘偺傾僫儘僌検傕庢傝崬傒傑偡丅

偙偺椺偱偼丄FF B6偑奺儃僞儞偺ON丄OFF丅85 00 E9 00偑僕儑僀僗僥傿僢僋2杮偺傾僫儘僌検丅
埲壓奺儃僞儞偺 墴壓偘検傾僫儘僌僨乕僞偲側傝傑偡丅
尰嵼幚憰偝傟偰偄傞僐儅儞僪偼埲忋偱偡丄堦斒揑側巊偄曽偲偟偰偼
儅僀僐儞偲愙懕偟僀儞僞乕僶儖僞僀儅側偳偱廃婜揑偵撉傒崬傒
僶僀僽儗乕僔儑儞偝偣偨偄帪偩偗僆僾僔儑儞傪晅偗偰憲偭偰傗傟偽
撉傒崬傒側偑傜僶僀僽傕惂屼偱偒傞偙偲偵側傝傑偡丅
丂
偄偐偑偱偟傚偆偐丄儔僕僐儞僾儘億傛傝抣抜偑埨偔僐儞僷僋僩両
側偵偟傠傾僫儘僌偱16幉傕偲傟傑偡丄巊偄曽偼怓乆偁傞偺偱偼側偄偱偟傚偆偐丠
偤傂儗億乕僩傪偍懸偪偟偰偍傝傑偡丅
2005/01/25丂NONSAYA丂ROBOT丂WORKS
2005/02/04 曄峏
1丄儅僀僐儞愙懕偺帪庢傝崬傒傗偡偄傛偆偵僄僐乕僶僢僋傪拞巭
儅僀僐儞愙懕帪偵僄僐乕僶僢僋偑婣偭偰偔傞偲丄側偵偐偲戝曄側偺偱
巚偄愗偭偰僄僐乕僶僢僋傪拞巭偵偟傑偟偨乮BS傑偱惂屼偟偰偄偨偺偱偡偑乯
庤擖椡帪偵傢偐傝偢傜偄応崌偼丄偙偺傛偆偵僴僀僷乕僞乕儈僫儖傪愝掕偟偰壓偝偄丅
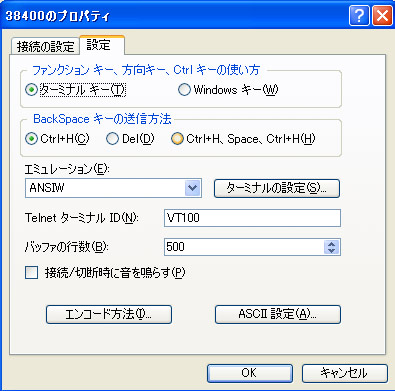
僴僀僷乕僞乕儈僫儖傪棫偪忋偘屻堦搙愗抐偟丄僼傽僀儖仺僾儘僷僥傿傪奐偔
愝掕僞僽傪僋儕僢僋偟ASCII愝掕乮A)傪僋儕僢僋
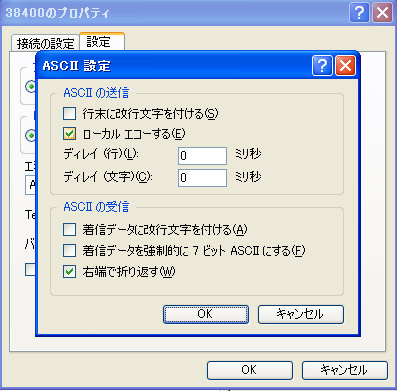
儘乕僇儖僄僐乕偡傞傪僋儕僢僋丄OK仺OK
埲忋偺愝掕偱儘乕僇儖僄僐乕僶僢僋偱偒傑偡丅
2丄儃乕儗乕僩傪38400倐倫倱偵曄峏
廐寧3664_16Mhz偱偼57600bps偵偡傞偲岆嵎偑戝偒偄偙偲偵崱崰婥偯偔(^_^;)
丂
丂