AIモータ
AIモータ
第一回ロボワンスペシャルにおいてベステク賞として西村委員長から新型AIモータ6セットを頂きました、
大した活躍もないのにどうして?と思う所ですが渡された西村さんの目が言っていました・・・・・
「おめーよ、これやるんだから当然紹介記事かくよなぁ〜、こちとら生活かかってんだから宜しくたのむぜ!」と・・・・・^^;
とまぁ上のは冗談として、使ってみた所なかなかいいのでWEBで紹介してみたいと思います。
まず仕様から(新型)
| Max Torque | 7kg.cm(10kg.cm未定) |
| Max Speed | 60rpm |
| Weight | 46g |
| Input signal | TTLレべルUART |
| Baud rate | 2400〜460800bps(57600bpsDEFAULT) |
| Control Angle | 0〜332deg |
| Input voltage | DC5〜10V |
特長
| 位置指示 | 5レベルスピードコントロール |
| フィードバック | 位置、電流、P、Dゲイン、解像度、 |
| 360度無限回転 | 0〜16レベルスピードコントロール |
| ユニークなID設定 | 0〜30まで |
| 各種パラメータ設定 |
ID,ボーレート、P,Dゲイン、
|
| シンクロ転送 | |
| 電源逆接プロテクト | |
| 電流制限プロテクト | |
| RS232Cシリアル |
|
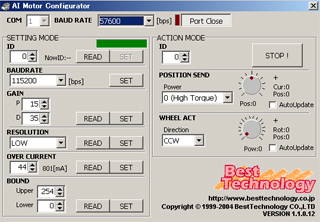
現在ベステクにて無償配布しているwin対応のソフトは |
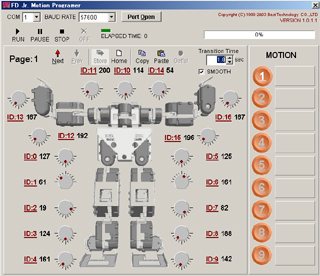
さらにモーションエディタとして8軸、17軸用のMotionPrograma |
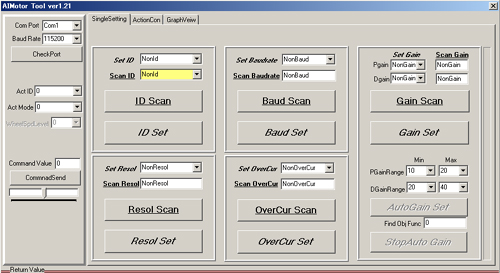 そしてmegaroboticsからAIMotortool そしてmegaroboticsからAIMotortool |
もちろん、Win上で動くのですから、普通のマイコンでも楽勝で動きます、
たとえば、位置指示の場合はこんな風に (詳しくはベステクからマニュアルをダウンロードしてね)

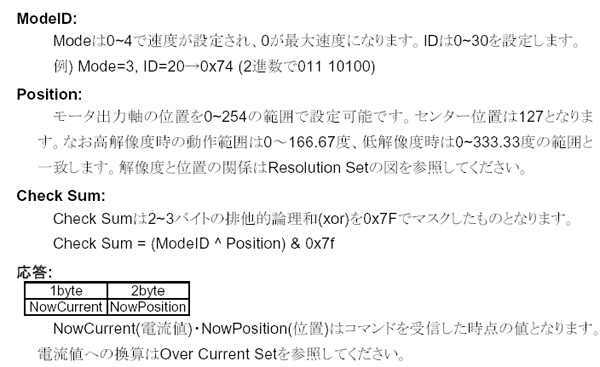
4バイトを送ると、2バイト分で現在の電流、位置が帰ってきます。
具体的にCでどうやるかと言うと
/////////////////////////////////////
/////// Position Send 位置指示 ////////
////////////////////////////////////
unsigned char SendPos(unsigned char ID,unsigned char Position){
unsigned char dummy;
unsigned char pos ;
unsigned char ModeID = 0; //スピードは最速固定
if(ID >30)return; // ID 30まで
ModeID <<= 5;
ModeID = ModeID | ID;
rs_putc2(0xff);
rs_putc2(ModeID);
rs_putc2(Position) ;
rs_putc2((ModeID ^ Position)&0x7f);
//位置読取
dummy = rs_getc2 (); //カレント電流は読み捨てる
pos = rs_getc2 ();
return pos;
}
(rs_putc2は1文字送る関数)
とこんな感じ。
さらに新型ではレスを返さないシンクロ転送モードが
実装されています。
こんな感じです、どうです思っていたよりも簡単だとおもいませんか?
実際の動作ビデオ
 これはWin上のソフトで作りましたが、10分もあればできます。
これはWin上のソフトで作りましたが、10分もあればできます。
☆使ってみて
うーん今まで通信にはまっていた自分にとって、あまりにも簡単すぎです
この手の低レベルなことを簡単にされると上位(運動学、その他)に充分時間が取れそうですね。
ただ惜しいのはトルクが少し足りないところと、位置制御が8bitしかない、プラギア、ベアリングなしと言う所でしょうか
がしかし、トルクが7kg.cm(10kg.cm未定)あるのですから、あまり力が必要でなく、位置も細かく制御しない、腕、頭、とかその他攻撃用に
いいのではないでしょうか?簡単にできる所はどんどん簡単にして行きたいですからね。
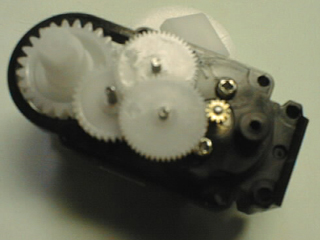
さてここで終わっては単なる宣伝になり、ベステクの廻し者みたいでイマイチですので、さっそく中を分解君してみましょう。
|
まずは上面のギアから・・・・ |
全てプラギアです |
|
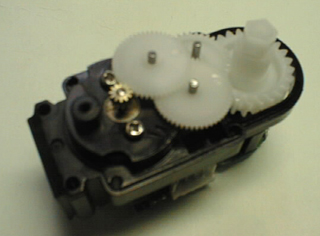
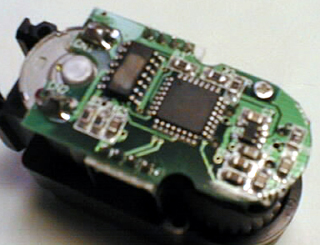
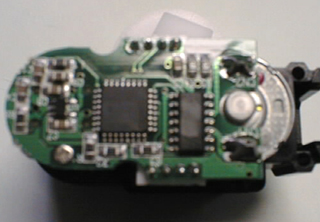
モータ取り付けねじを外し基板を降ろすと・・・・・
|
うーんポテンションはアルプスの例の奴ですね。
|
|
さてお待ちかねのCPU部分、CPU、IC上面は削られていて |
細長いICはFETらしきものが見あたらないので多分 |
先日近藤さんからREDバージョンが発売になりましたね、今までのラジコンサーボの決まりを守りつつ
位置データ、ゲイン変更とうまく考えて作られたなと思います、どんな世界でも同じような過程を通るのですが
多分今がロ ボット用アクチュエータの過度期なんでしょうね、 これから先はどのように収束していくのかなぁ〜と思うと当然、
もっときめ細かな制御が求められると思いますので、当然ラジコンの20mSというのは
消えていき上記のAIモータのような通信方式によるサーボがたくさんでてくるような気がします。
だから言って指を咥えていたのでは、まずいのですが今まで散々散財している人間にとって新型サーボで10万、20万
というのはとても出せる金額ではありません、
だからI2Cを始めたのですが、システムは完成してもI2Cのプロトコルがわからないと話にならないし、
Win上で簡単ソフトというのも中々作れません。
そこで・・・・・・もうわかりましたか?・・・・(@^^)/~~~
このAIがらみのWinのソフトは揃っている、通信規格もはっきりしている、となれば当然赤ラベルに対して
V.S.O.Pとなるわけですよ(^.^)
(V.S.O.P Victory Serbo Open Project 勝利のサーボ開放計画)
オチもついたところで今回はこの辺まで・・・・・・えーっとISPはミソにモシか(^_-)-☆
Link
発売元 ベストテクノロジー
製造元 MEGAROBOTICS(韓国)
あ!やべ、これ全然紹介ページになってないや!^^;
03/06/2004 気が向いたら更新予定